About the Project
Pignoletto aims to create a multiscale analysis system of the characteristics of the soils and the environment, based on the combination of geophysical field measurements with measurements obtained from airborne sensors, satellite information and proximity surveys.
-
Date
April 2023
Nuclear Instruments

Unione Europea
Stato Italiano
Regione Lombardia
FESR

Introduction
Pignoletto addresses the specific needs of Regione Lombardia in Italy to improve quality and efficiency in agricolture to reduce costs and environmental impact. The answer to this need is Precision Agriculture (AP).
Precision Agricolture is a soil management system that applies effective agronomic practices to optimize the phases of mechanical processing, fertilization, weeding, irrigation, distribution of pesticides, and harvesting to a very high detailed degree (theoretically metric), by dosing the intensity according to the characteristics of the soil and the crop.
Pignoletto aims to systematize the skills present in Lombardy in the aerospace and agri-food sectors for the establishment of a technological HUB with international projection in the field of development and use of territorial monitoring systems using remotely piloted devices (remote controlled vehicles, land, avionics and satellite).
Specifically, Pignoletto aims to create a multiscale analysis system of the characteristics of the soils and the environment, based on the combination of geophysical field measurements with measurements obtained from airborne sensors (ionizing gamma radiation, optical hyperspectral, thermal multispectral), satellite information (PRISMA and Copernicus) and proximity surveys.
Pignoletto requires the synergistic development, implementation and testing of numerous innovative technologies, ranging from the creation of both optical and ionizing radiation sensors, to specialized electronics for drones and satellites and to the laboratory validation of remote measurements. As regards the experimental development (integration of UAV sensors), it is planned to house the different sensors in two commercial UAV platforms, developing the integration part and the communication protocols between the aircraft. The integration of sensors onboard the UAVs and all related indoor test procedures will be carried out at the Aermatica3D laboratories. It will provide a flight test area in which, with its pilots and procedures authorized by ENAC, flight tests and trials will be carried out with drones and integrated instruments. From the avionic point of view, it is planned to acquire three UAVs capable of housing the instruments necessary for monitoring the properties of the soils. Rover and measurement systems will be acquired during the project.
The equipment for high-resolution X, alpha, beta and gamma spectroscopy for the analysis of radioactive elements and ultra-trace elements in soils, will be made possible by INFN. Further instrumentation, compact and transportable on drone, will be acquired during the project. The development of the radiation sensors and the acquisition and transmission chains will be realized by Nuclear Instruments and Else Nuclear. The advanced electronics required by Pignoletto will be developed in the design laboratories (equipped with advanced electronic design systems), development and integration of electronic and optoelectronic units, clean room and test facilities for electronic and optoelectronic systems.
Nuclear Instruments’ role in Pignoletto
Nuclear Instruments developed a detector based on large area scintillators to be placed underneath the drone. The first tests were carried out on the 9th July of 2021 using a digital iSpector with 18x18x30 mm scintillator crystal. The tests have shown that the solution of scintillator coupled to SiPM detectors allows the identification of radioisotopes, in particular the presence of a potassium source, dispersed inside potassium chloride bags.
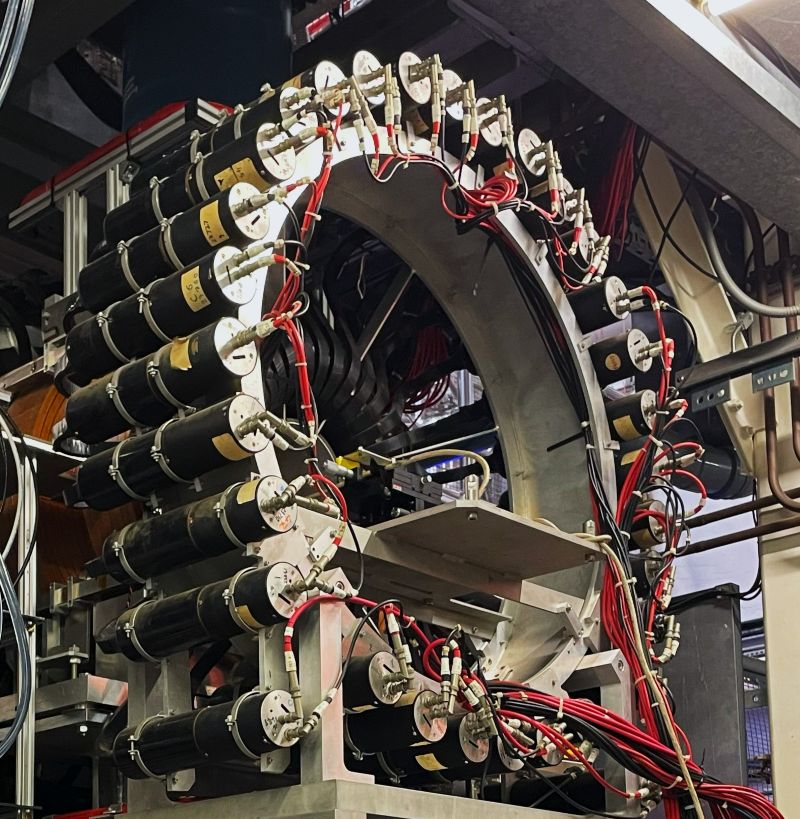
After the first run of tests, Nuclear Instruments started developing a new detector based on 120x30x30 scintillating bars, independently read by SiPM detectors.
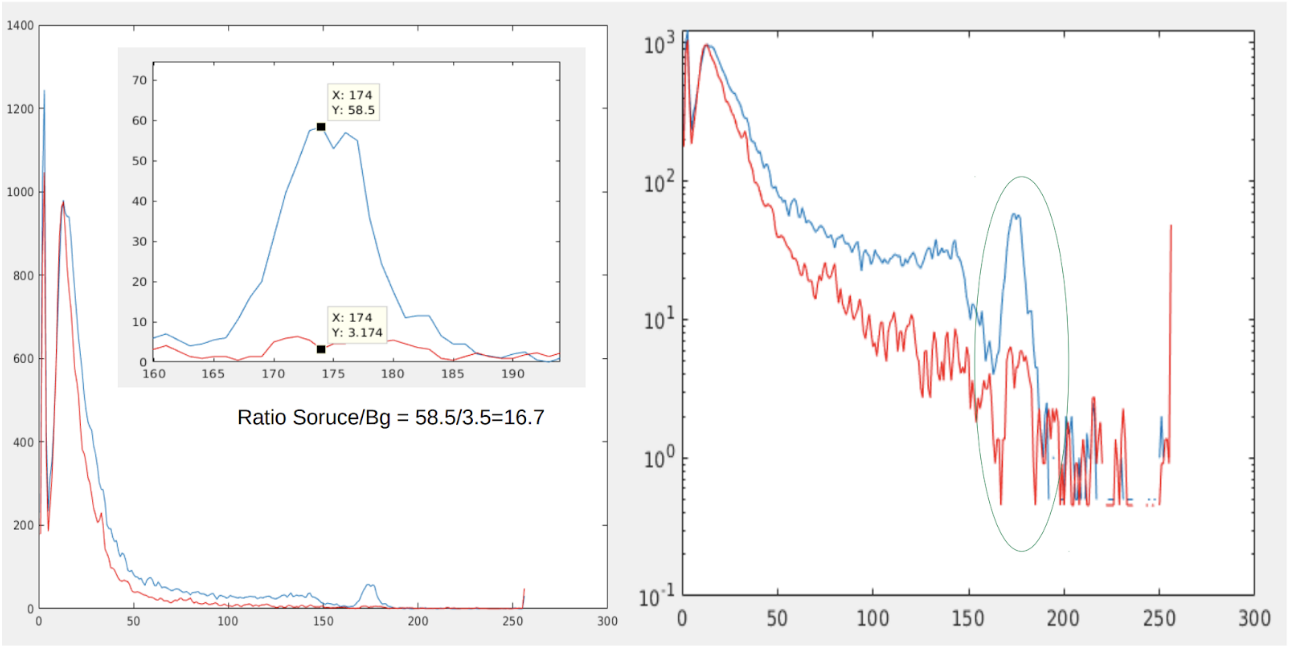
The backgroud is represented in red, while in blue the spectrum acquired by the drone in stationary measurement above the bags of NaCl. The sensitivity of the instrument is insufficient for the measurement of a source along a scanning path carried out by the drone continuously.
The backgroud is represented in red, while in blue the spectrum acquired by the drone in stationary measurement above the bags of NaCl. The sensitivity of the instrument is insufficient for the measurement of a source along a scanning path carried out by the drone continuously.
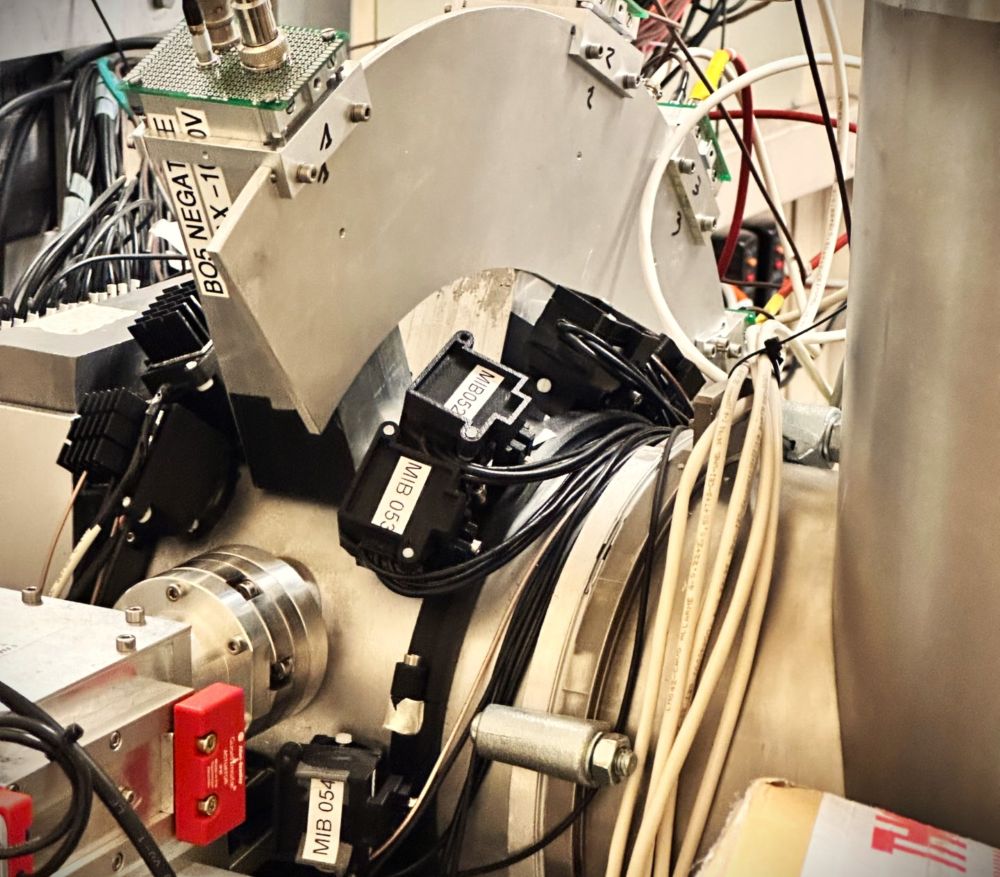
Each detector has a sensitive area of 30×30 mm by coupling to the shorter side of the scintillating bars.
It also includes a complete analog and digital chain and a trigger system that allows you to perform an event building by combining the data from all the acquisition chains via a Zynq device. The digital sum of the events allows to obtain a detection area as large as desired.
Each detector has a sensitive area of 30×30 mm by coupling to the shorter side of the scintillating bars.
It also includes a complete analog and digital chain and a trigger system that allows you to perform an event building by combining the data from all the acquisition chains via a Zynq device. The digital sum of the events allows to obtain a detection area as large as desired.
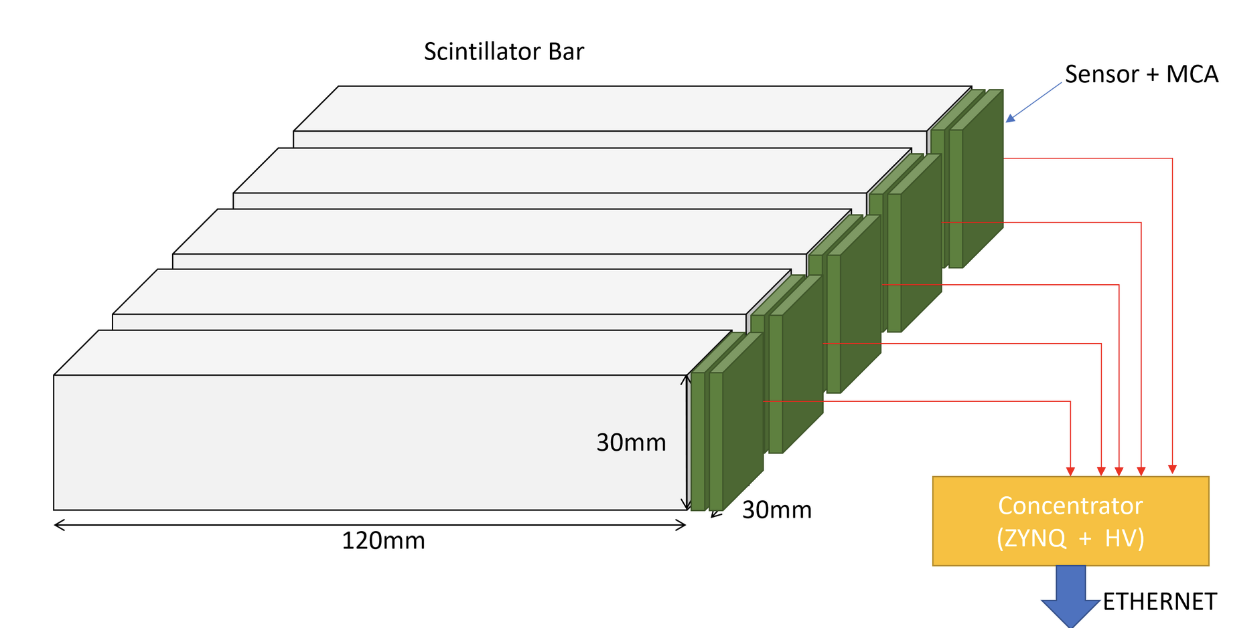
Diagram of the readout system of the detector.
Diagram of the readout system of the detector.
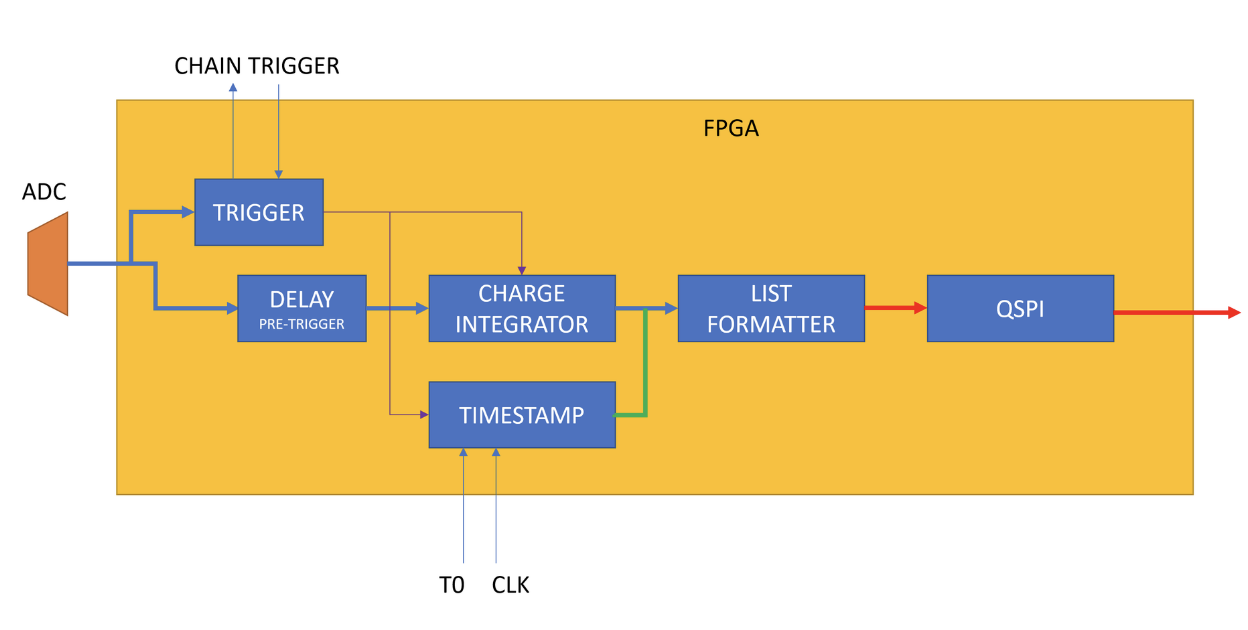
FPGA-based digital processing chain
FPGA-based digital processing chain
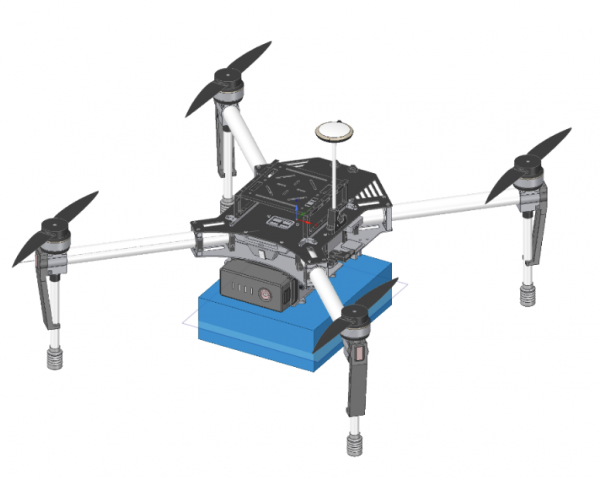
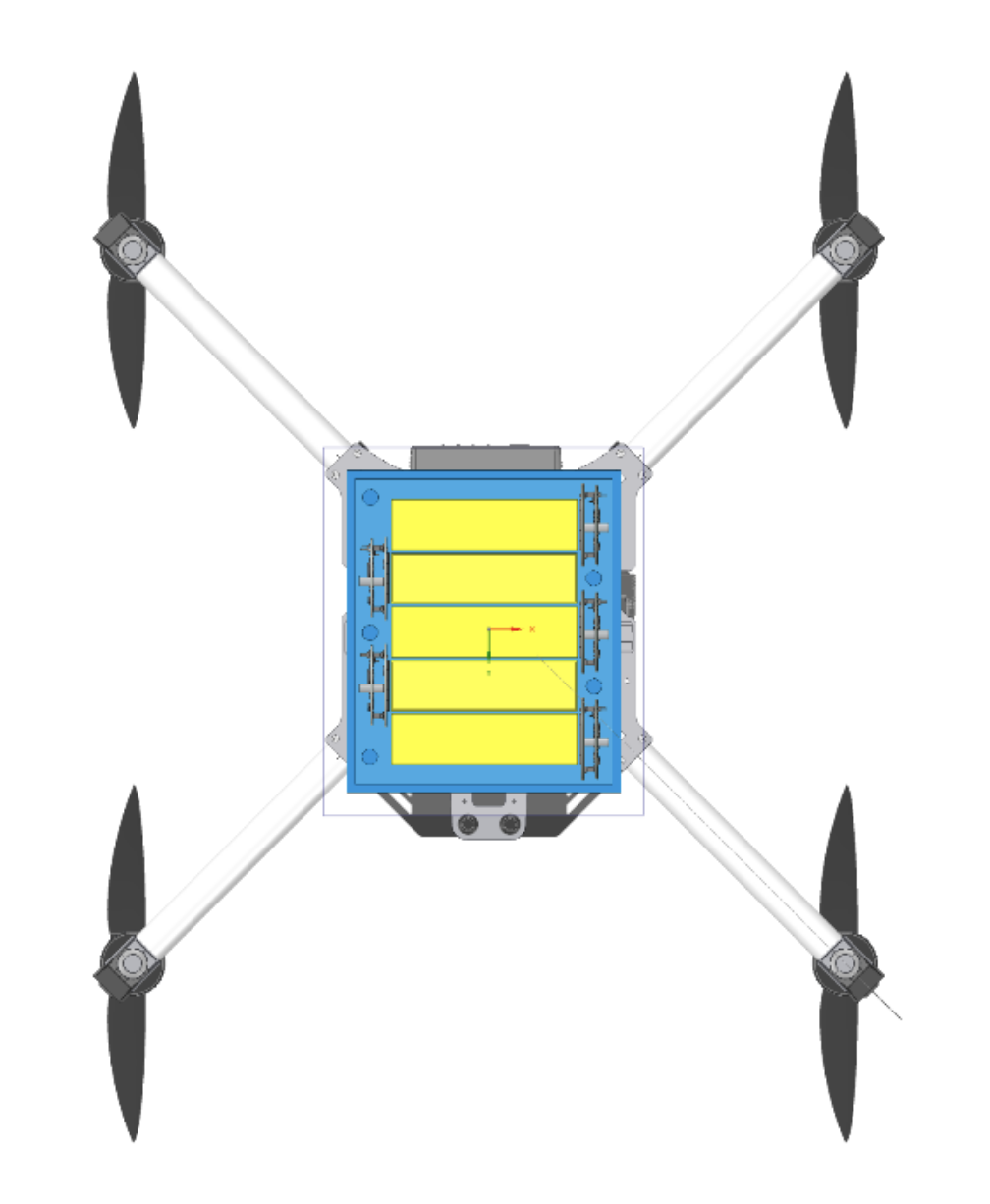
Installation on the drone: the system consists of a “dark” area where there are the MCAs, SENSORS, and SPARKERS and a processing area where the ZYNQ device is present.
Installation on the drone: the system consists of a “dark” area where there are the MCAs, SENSORS, and SPARKERS and a processing area where the ZYNQ device is present.
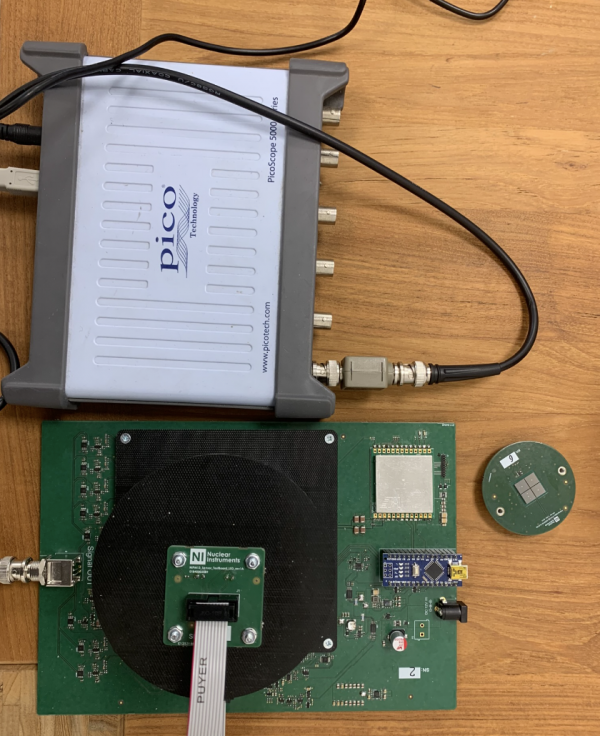
Characterization system of the SiPM response to light as a function of temperature. The system allows us to develop an algorithm to minimize the spread of the energy measurement between one scintillator and the other by using the light emitted at regular intervals by calibration LED as a reference.
Characterization system of the SiPM response to light as a function of temperature. The system allows us to develop an algorithm to minimize the spread of the energy measurement between one scintillator and the other by using the light emitted at regular intervals by calibration LED as a reference.
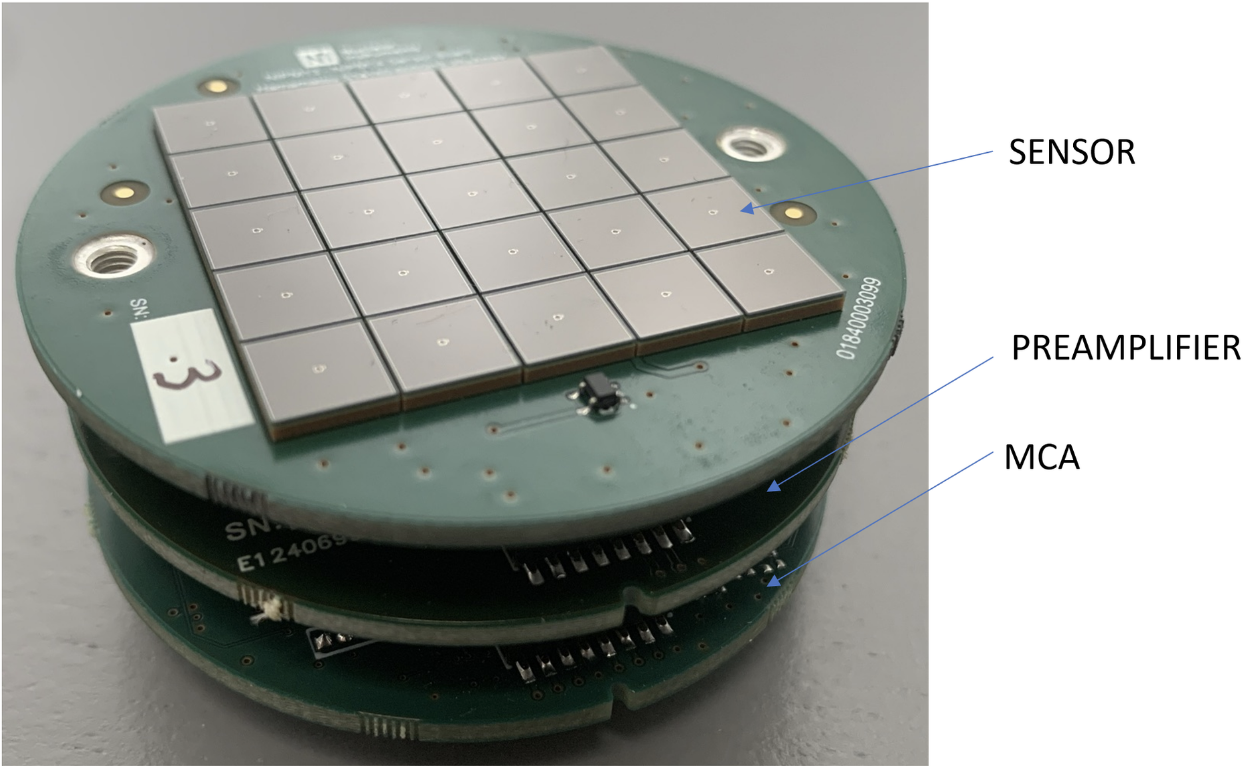
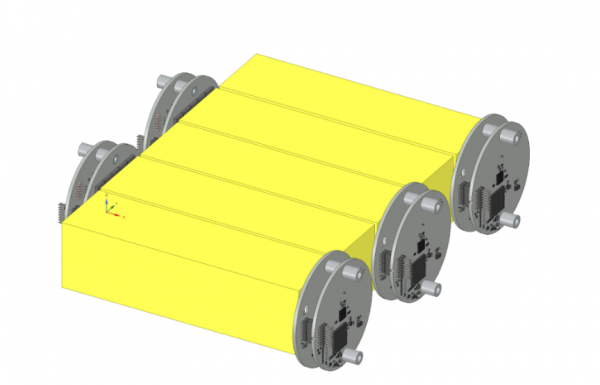
Stackup of the detection system to be coupled to the ends of the scintillation bars.
Stackup of the detection system to be coupled to the ends of the scintillation bars.
Mechanical drawing of the detection system. Bottom view.
Mechanical drawing of the detection system. Bottom view.